![]()
CodeLab IDE & Simulators
API CodeLab - Langage C
Ce document n'est pas une référence du langage C. Il présente les fonctions présentes dans les bibliothèques C associées aux modules applicatifs intégrés à CodeLab. Pour les utiliser, il est nécessaire de connaître les bases de la programmation C.
Notion de bibliothèque
Le langage C intègre de façon native les concepts de base de la programmation impérative (types primitifs, gestion des variables et de la mémoire, structures de programmation, entrées et sorties de bas niveau). Pour aller plus loin, il faut préciser en début de programme avec la directive #include les bibliothèques (ou librairies) qui contiennent les fonctions utilisées qui ne font pas partie du langage C de base. Ce n'est pas une instruction du langage C, mais une directive prise en compte au moment de la compilation.
Les fonctions décrites dans ce document sont rangées dans 4 bibliothèques :
#include "codelab/utils.c"charge des fonctions utilitaires (entrées-sorties essentiellement)#include "codelab/moduleGraphics/graph2D.c"charge les fonctions du module graphique 2D#include "codelab/moduleRobotics/robotLego.c"charge les fonctions du module robotique mobile#include "codelab/moduleRobotics3D/robotCoretech.c"charge les fonctions du module robotique 3D
Notion de prototype
Pour documenter une fonction, on utilise son prototype qui précise :
- Le nom de la fonction ;
- Le type de la valeur de retour ou
voidsi pas de valeur de retour ; - Le nombre et le type des paramètres (les noms des paramètres sont donnés à titre indicatif).
Il faut bien distinguer prototype d'une fonction et appel de cette même fonction :
Par exemple void drawCircle(int x, int y, int r) est le prototype de la fonction drawCircle. Pour appeler cette fonction dans un programme, il ne faut écrire ni le void en début de ligne, ni les int devant les paramètres, et il faut ajouter un point-virgule après la parenthèse fermante :
#include "codelab/moduleGraphics/graph2D.c"
// Dessine un cercle de centre (100, 100) et de rayon 50
void main() {
clearScreen();
drawCircle(100, 100, 50);
}

Bibliothèque utilitaire
Cette bibliothèque contient essentiellement des fonctions d'entrée et de sorties (texte, audio, etc.) et d'accès aux périphériques. Le type string (chaîne de caractères) n'existe pas en tant que tel en langage C ; il a été implémenté dans cette bibliothèque par un #define string char* dans un souci de simplification d'écriture. Attention : la manipulation des chaînes de caractères en langage C repose sur des mécanismes de gestion de la mémoire (allocation dynamique). Consultez une documentation adaptée si besoin. Les retours à la ligne doivent être indiqués à l'aide de la notation \n à l'intérieur des chaînes de caractères.
Par ailleurs, il est toujours possible d'utiliser les fonctions d'entrées-sorties de la librairie standard stdio.h en ajoutant la directive #include <stdio.h> en début de programme. Sachez également que codelab/utils.c inclue la librairie standard.
Fonctions d'affichage vers la console :
void printStr(string chaine)void printStrLn(string chaine)void printInt(int entier)void printIntLn(int entier)void printLong(long entier)void printLongLn(long entier)void printFloat(float flottant)void printFloatLn(float flottant)void printFormat(string format, ...)void newline()
Fonctions d'entrée au clavier :
string inputStr(string prompt)int inputInt(string prompt)float inputFloat(string prompt)void waitKeyPressed()
Fonctions d'accès aux périphériques :
int getNumPadValue()int getJoystickValueX()int getJoystickValueY()int hasNextEvent()string getNextEvent()void resetEventQueue()
Fonctions de sortie audio :
void playTone(int freq, int duree)void playToneOn(int freq)void playToneOff()void playAudioFile(string fichier)void loopAudioFile(string fichier)void stopAudioPlayer()
Fonctions additionnelles :
void printStr(string chaine)
void printStrLn(string chaine)
Description : Affiche une chaine de caractères dans la console (suffixe Ln = retour à la ligne)
- Paramètre chaine : le texte à afficher (variable ou constante littérale)
- Valeur de retour : aucune
void printInt(int entier)
void printIntLn(int entier)
Description : Affiche un nombre entier dans la console (suffixe Ln = retour à la ligne)
- Paramètre entier : la valeur à afficher (variable ou constante littérale)
- Valeur de retour : aucune
void printLong(long entier)
void printLongLn(long entier)
Description : Affiche un nombre entier long dans la console (suffixe Ln = retour à la ligne)
- Paramètre entier : la valeur à afficher (variable ou constante littérale)
- Valeur de retour : aucune
void printFloat(float flottant)
void printFloatLn(float flottant)
Description : Affiche un nombre à virgule flottante dans la console (suffixe Ln = retour à la ligne)
- Paramètre flottant : la valeur à afficher (variable ou constante littérale)
- Valeur de retour : aucune
void printFormat(string format, ...)
Description : Permet d'afficher des valeurs de façon formatée
- Paramètre format : une chaîne de caractères comportant des "places"
- Valeur de retour : aucune
Explication : Cette fonction d'affichage peut prendre un nombre variable de paramètres. Le premier paramètre (obligatoire) est une chaîne de caractères comportant des "places" notées % où seront insérées les valeurs de différentes expressions, les paramètres suivants sont les expressions. Il doit y avoir autant de "places" que d'expressions. Le principe est le suivant : chaque % est suivi d'une lettre qui précise le type de l'expression à afficher :
%dpour unint%lpour unlong%fpour unfloat%spour unstring
Exemple d'utilisation :
#include "codelab/utils.c"
void main() {
string nom = "Valentin";
int age = 14;
printFormat("Bonjour %s tu as %d ans\n", nom, age);
}
Description : Provoque un retour à la ligne dans la console
- Paramètre : aucun
- Valeur de retour : aucune
string inputStr(string prompt)
Description : Affiche un prompt dans la console et saisit une chaîne de caractères
- Paramètre prompt : un texte à afficher dans la console en guise de prompt
- Valeur de retour : la chaîne saisie au clavier
Description : Affiche un prompt dans la console et saisit un nombre entier
- Paramètre prompt : un texte à afficher dans la console en guise de prompt
- Valeur de retour : le nombre entier saisi au clavier
float inputFloat(string prompt)
Description : Affiche un prompt dans la console et saisit un nombre flottant
- Paramètre prompt : un texte à afficher dans la console en guise de prompt
- Valeur de retour : le nombre flottant saisi au clavier
Description : Attend une action au clavier (fonction bloquante)
- Paramètre : aucun
- Valeur de retour : aucune
Description : Retourne la valeur du périphérique virtuel "clavier numérique"
- Paramètre : aucun
- Valeur de retour : un entier dans l'intervalle [ -1, 11 ]
Explication : Le clavier numérique (numpad) est un périphérique non-bloquant, c'est-à-dire qu'il retourne toujours une valeur, même lorsqu'aucune touche n'est sélectionnée. Dans ce cas, il retourne la valeur -1. Les valeurs 10 et 11 correspondent respectivement aux touches [*] et [ # ].
int getJoystickValueX()
int getJoystickValueY()
Description : Retourne les valeur en X et en Y du périphérique virtuel "joystick"
- Paramètre : aucun
- Valeur de retour : un entier dans l'intervalle [ -100, 100 ]
Description : Informe s'il y a des évènements en attente d'être traités
- Paramètre : aucun
- Valeur de retour : 0 si la file d'attente est vide, 1 sinon
Description : Récupère un évènement dans la file d'attente
- Paramètre : aucun
- Valeur de retour : l'évènement codé dans une chaîne
"device=AAA:name=BBB:value=CCC"
Exemple d'utilisation : Une méthode pour décoder l'évènement est d'utiliser une expression régulière ou la fonction sscanf :
#include "codelab/utils.c"
#define REGEXP "device=%[^:]:name=%[^:]:value=%s"
...
while (hasNextEvent()) {
string event = getNextEvent();
if (sscanf(event, REGEXP, device, name, value) == 3) {
...
}
}
Description : Réinitialise (vide) la file d'attente d'évènements
- Paramètre : aucun
- Valeur de retour : aucune
void playTone(int frequence, int duree)
Description : Génère un son d'une fréquence et d'une durée données (fonction bloquante)
- Paramètre frequence : la fréquence exprimée en Hertz
- Paramètre duree : la durée exprimée en millisecondes
- Valeur de retour : aucune
void playToneOn(int frequence)
Description : Génère un son d'une fréquence donnée (fonction non bloquante)
- Paramètre frequence : la fréquence exprimée en Hertz
- Valeur de retour : aucune
Description : Stoppe le générateur de fréquence initialisé avec playToneOn
- Paramètre : aucun
- Valeur de retour : aucune
void playAudioFile(string fichier)
void loopAudioFile(string fichier)
Description : Joue un fichier audio WAV au format PCM 44100 Hz, 8 ou 16 bits
- Paramètre fichier : le nom du fichier, placé dans le répertoire
audiofiles - Valeur de retour : aucune
Description : Stoppe le player initialisé avec playAudioFile ou loopAudioFile
- Paramètre : aucun
- Valeur de retour : aucune
int randomInt(int max)
void initRandom()
Description : Retourne un nombre entier "pseudo-aléatoire" (cf. note)
- Paramètre max : la borne supérieure (exclue) de l'intervalle
- Valeur de retour : le nombre entier aléatoire dans [ 0, max [
Attention : Pour obtenir des suites aléatoires différentes à chaque exécution du programme, placer l'instruction initRandom() au début du programme.
Description : Provoque une temporisation pendant une durée donnée (fonction bloquante)
- Paramètre duree : la durée exprimée en millisecondes
- Valeur de retour : aucune
Description : Retourne un "temps système" dans un entier long
- Paramètre : aucun
- Valeur de retour : le temps système exprimé en millisecondes
Explication : Tout ordinateur peut accéder à un "temps système" qui permet de calculer des intervalles de temps. Attention : la valeur retournée par la fonction systemTime peut être très grande et nécessite l'usage du type entier long.
Module Graphique 2D
Cette bibliothèque rassemble les fonctions de l'atelier graphique. Elle comporte deux familles de fonctions : les fonctions de tracé des primitives géométriques (point, ligne et cercle) ainsi que les fonctions de pilotage de la tortue graphique (avancer, tourner à gauche, tourner à droite, etc.). Pour plus d'informations sur la tortue graphique, consultez la page Wikipedia consacrée au langage Logo et à sa pédagogie.
Les fonctions de la bibliothèque du module graphique sont les suivantes :
void clearScreen()void setColor(int couleur)void drawPoint(int x, int y)void drawLine(int x1, int y1, int x2, int y2)void drawCircle(int x, int y, int rayon)void turtleShow()void turtleHide()void turtleReset()void turtleGoto(int x, int y)void turtleForward(int distance)void turtleTurnLeft(int angle)void turtleTurnRight(int angle)
Description : Efface la zone de dessin
- Paramètre : aucun
- Valeur de retour : aucune
Description : Fixe la couleur utilisée pour les tracés à venir
- Paramètre : un code de couleur autorisé (cf. ci-dessous)
- Valeur de retour : aucune
Codes de couleur :
- Pour spécifier la couleur blanche utilisez la constante
COLOR_WHITE - Pour spécifier la couleur noire utilisez la constante
COLOR_BLACK - Pour spécifier la couleur rouge utilisez la constante
COLOR_RED - Pour spécifier la couleur verte utilisez la constante
COLOR_GREEN - Pour spécifier la couleur bleue utilisez la constante
COLOR_BLUE - Pour spécifier la couleur cyan utilisez la constante
COLOR_CYAN - Pour spécifier la couleur jaune utilisez la constante
COLOR_YELLOW
Description : Allume un pixel en position (x, y)
- Paramètre x : la coordonnée en abscisse du pixel
- Paramètre y : la coordonnée en ordonnée du pixel
- Valeur de retour : aucune
void drawLine(int x1, int y1, int x2, int y2)
Description : Trace une ligne entre le point (x1, y1) et le point (x2, y2)
- Paramètre x1 : la coordonnée en abscisse du premier point
- Paramètre y1 : la coordonnée en ordonnée du premier point
- Paramètre x2 : la coordonnée en abscisse du deuxième point
- Paramètre y2 : la coordonnée en ordonnée du deuxième point
- Valeur de retour : aucune
void drawCircle(int x, int y, int rayon)
Description : Trace un cercle de centre (x, y) et de rayon rayon
- Paramètre x : la coordonnée en abscisse du centre du cercle
- Paramètre y : la coordonnée en ordonnée du centre du cercle
- Paramètre rayon : le rayon du cercle
- Valeur de retour : aucune
void turtleShow()
void turtleHide()
Description : Montre ou cache la tortue graphique
- Paramètre : aucun
- Valeur de retour : aucune
Description : Réinitialise la tortue graphique (centrée)
- Paramètre : aucun
- Valeur de retour : aucune
Description : Place la tortue en position (x, y) sans tracer de ligne
- Paramètre x : la coordonnée en abscisse du point d'arrivée
- Paramètre y : la coordonnée en ordonnée du point d'arrivée
- Valeur de retour : aucune
void turtleForward(int distance)
Description : Déplace la tortue en ligne droite sur une distance donnée
- Paramètre distance : la distance en "équivallent pixels"
- Valeur de retour : aucune
void turtleTurnLeft(int angle)
Description : Pivote la tortue dans le sens anti-horaire selon un angle donné
- Paramètre angle : l'angle exprimé en degrés
- Valeur de retour : aucune
void turtleTurnRight(int angle)
Description : Pivote la tortue dans le sens horaire selon un angle donné
- Paramètre angle : l'angle exprimé en degrés
- Valeur de retour : aucune
Module Robotique mobile
Cette bibliothèque rassemble les fonctions permettant de piloter le robot NXT de l'atelier robotique. Toutes ces fonctions possèdent un paramètre port de type int qui représente, soit un port de sortie (pour accéder aux moteurs), soit un port d'entrée (pour accéder aux capteurs). Il est également possible dans certains cas de spécifier deux ports de sortie simultanément.
Le robot NXT dispose de trois ports de sortie mais seulement deux sont utilisés dans le simulateur : le port B sur le quel est connecté le moteur gauche, et le port C sur le quel est connecté le moteur droit.
- Pour spécifier le port B utilisez la constante prédéfinie
OUT_B - Pour spécifier le port C utilisez la constante prédéfinie
OUT_C - Pour spécifier les ports B et C utilisez la constante prédéfinie
OUT_BC
Le robot NXT dispose également de quatre ports d'entrée. Le simulateur propose des configurations pré-établies (outil « clé » dans la barre d'outils) à choisir en fonction de l'exercice à réaliser. Par exemple, la configuration COLOR/SONIC/SONIC/NONE signifie qu'un capteur de couleur est relié au port n°1 et que deux capteurs de distance sont reliés respectivement aux ports n°2 et n°3, le port n°4 étant inutilisé.
- Pour spécifier le port 1 utilisez la constante prédéfinie
IN_1 - Pour spécifier le port 2 utilisez la constante prédéfinie
IN_2 - Pour spécifier le port 3 utilisez la constante prédéfinie
IN_3 - Pour spécifier le port 4 utilisez la constante prédéfinie
IN_4
Les fonctions de la bibliothèque du module robotique sont les suivantes :
void motorOn(int port, int puissance)void motorOff(int port)void resetMotorRotationCount(int port)int motorRotationCount(int port)int getSensorValue(int port)void getSensorArray(int port, int array[])
void motorOn(int port, int puissance)
Description : Actionne un ou plusieurs moteurs
- Paramètre port : le(s) port(s) moteur (utilisez une constante symbolique)
- Paramètre puissance : la puissance du/des moteur(s) dans l'intervalle [ -100, 100 ]
- Valeur de retour : aucune
Attention : Une valeur en dehors de l'intervalle [ -100, 100 ] provoque un arrêt d'urgence
Description : Stoppe un ou plusieurs moteurs
- Paramètre port : le(s) port(s) moteur (utilisez une constante symbolique)
- Valeur de retour : aucune
int motorRotationCount(int port)
Description : Récupère la valeur du compteur de rotation d'un moteur
- Paramètre port : le port du moteur (utilisez une constante symbolique)
- Valeur de retour : le nombre de degrés effectué depuis la dernière remise à 0
Explication : En interne, chaque moteur est associé à un dispositif optique qui compte le nombre de degrés que le moteur effectue. Lorsqu'on utilise cette fonction, le moteur est alors considéré comme un capteur, puisqu'il retourne une valeur.
Attention : Cette fonction n'est applicable qu'à un seul moteur à la fois
void resetMotorRotationCount(int port)
Description : Stoppe un moteur et réinitialise son compteur de rotation (remise à 0)
- Paramètre port : le port du moteur (utilisez une constante symbolique)
- Valeur de retour : aucune
Attention : Cette fonction n'est applicable qu'à un seul moteur à la fois
Description : Récupère la valeur d'un capteur (à l'exception du capteur de ligne)
- Paramètre port : le port d'entrée utilisé (utilisez une constante symbolique)
- Valeur de retour : la valeur lue (ou -1 en cas d'erreur de lecture) :
- Si le capteur est le clavier numérique, on obtient une valeur dans [ -1, 11 ]
- Si le capteur est la boussole, on obtient une valeur en degrés dans [ 0, 360 [
- Si le capteur est un capteur de contact, on obtient une valeur 0 ou 1
- Si le capteur est un capteur de distance, on obtient une distance en cm dans [ 0, 100 ]
-
Si le capteur est un capteur de couleur, on obtient une couleur codée comme suit :
- La couleur blanche est codée par la constante
COLOR_WHITE - La couleur noire est codée par la constante
COLOR_BLACK - La couleur rouge est codée par la constante
COLOR_RED - La couleur verte est codée par la constante
COLOR_GREEN - La couleur bleue est codée par la constante
COLOR_BLUE - La couleur cyan est codée par la constante
COLOR_CYAN - La couleur jaune est codée par la constante
COLOR_YELLOW - Le code
COLOR_ERRORsignifie que la couleur n'a pas pu être déterminée
- La couleur blanche est codée par la constante
Attention : La couleur cyan possède une propriété particulière : celle de se comporter comme un obstacle avec les capteurs de contact et de distance, ainsi qu'avec le robot lui-même (collisions). Elle est notamment utilisée sur certains fonds.
Note : Le clavier numérique (numpad) est un périphérique non-bloquant, c'est-à-dire qu'il retourne toujours une valeur, même lorsqu'aucune touche n'est sélectionnée. Dans ce cas, il retourne la valeur -1. Les valeurs 10 et 11 correspondent respectivement aux touches [*] et [ # ].
void getSensorArray(int port, int array[])
Description : Récupère dans un tableau les 8 valeurs du capteur de ligne
- Paramètre port : le port d'entrée utilisé (utilisez une constante symbolique)
- Paramètre array : un tableau de 8 entiers (modifié par la fonction)
- Valeur de retour : aucune
Exemple d'utilisation :
#include "codelab/moduleRobotics/robotLego.c"
void main() {
int array[8];
...
getSensorArray(IN_1, array);
...
}
Module Robotique 3D
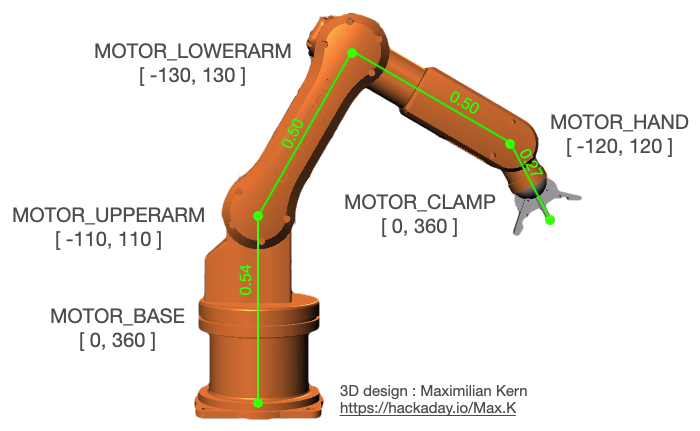
Cette bibliothèque rassemble les fonctions permettant de piloter le robot CORETECH de l'atelier robotique 3D. Ce bras manipulateur comporte 5 moteurs pas-à-pas, les quels actionnent les 4 axes principaux du robot, et l'orientation de la pince. Les moteurs sont identifiés par les constantes prédéfinies entières suivantes :
Les fonctions pour accéder aux moteurs sont les suivantes :
int motorOn(int motor, float speed)int motorStep(int motor, int steps)int motorOff(int motor)int grab()int drop()
Les fonctions pour accéder aux capteurs sont les suivantes :
Les fonctions de dessin dans l'espace sont les suivantes :
int plot()int drawOn()int drawOff()int clearAll()int setColor(int r, int g, int b)char* putBall(float x, float y, float z, int r, int g, int b, char* descr)
Les fonctions d'accès aux positions sont les suivantes :
int motorOn(int motor, float speed)
Description : Actionne un moteur avec une vitesse donnée
- Paramètre motor : l'identificateur du moteur (constante symbolique)
- Paramètre speed : la vitesse du moteur dans l'intervalle [-2.0, 2.0]
- Valeur de retour : 1 si la commande a été exécutée, -1 sinon
Attention : Une valeur en dehors de l'intervalle [-2.0, 2.0] provoque un arrêt d'urgence.
int motorStep(int motor, int steps)
Description : Actionne un moteur d'un nombre de pas donné
- Paramètre motor : l'identificateur du moteur (constante symbolique)
- Paramètre steps : le nombre de pas dans l'intervalle [-10, 10]
- Valeur de retour : 1 si la commande a été exécutée, -1 sinon
Attention : Une valeur en dehors de l'intervalle [-10, 10] provoque un arrêt d'urgence.
Description : Stoppe un moteur
- Paramètre motor : l'identificateur du moteur (constante symbolique)
- Valeur de retour : 1 si la commande a été exécutée, -1 sinon
Description : Actionne la pince pour saisir ou relâcher un objet
- Paramètre : aucun
- Valeur de retour : 1 si la commande a été exécutée, -1 sinon
Description : Retourne la position de l'élément actionné par un moteur
- Paramètre motor : l'identificateur du moteur (constante symbolique)
- Valeur de retour : un angle en degrés
Attention : Les plages angulaires des éléments sont les suivantes :
- Axe 0 : base (shoulder) : [0, 360] en continu
- Axe 1 : bras supérieur (upper arm) : [-110, 110]
- Axe 2 : bras inférieur (lower arm) : [-130, 130]
- Axe 3 : main (hand) : [-120, 120]
- Axe 4 : pince (claw) : [0, 360] en continu
char* getSensorValue(int sensor)
Description : Retourne la valeur d'un capteur
- Paramètre sensor : l'identificateur du capteur (constante symbolique)
- Capteur de contact au bout de la pince :
CONTACT_SENSOR - Capteur de couleur au bout de la pince :
COLOR_SENSOR
- Capteur de contact au bout de la pince :
- Valeur de retour : la donnée codée dans une chaîne de caractères ou "ERROR"
Attention : le codage de la valeur de retour dépend du type du capteur :
- Dans le cas du capteur de contact :
"1"si contact ou""(chaîne vide) - Dans le cas du capteur de couleur :
"R:G:B"(code RGB) ou"NONE"
Description : Place un point aux coordonnées données par l'extrémité de la pince, et de couleur donnée par setColor
- Paramètre : aucun
- Valeur de retour : 1 si la commande a été exécutée, -1 sinon
Description : Initialise un tracé de couleur donnée par setColor
- Paramètre : aucun
- Valeur de retour : 1 si la commande a été exécutée, -1 sinon
Description : Met fin au tracé initialisé avec drawOn
- Paramètre : aucun
- Valeur de retour : 1 si la commande a été exécutée, -1 sinon
Description : Efface les tracés et supprime les objets de la scène
- Paramètre : aucun
- Valeur de retour : 1 si la commande a été exécutée, -1 sinon
int setColor(int r, int g, int b)
Description : Définit la couleur des tracés à venir réalisés avec plot et drawOn
- Paramètres r, g, b : les composantes RGB de la couleur dans [0, 255]
- Valeur de retour : 1 si la commande a été exécutée, -1 sinon
char* putBall(float x, float y, float z, int r, int g, int b, const char* descr)
Description : Crée et positionne une balle colorée dans la scène du robot
- Paramètres x, y, z : les coordonnées où placer la balle dans la scène
- Paramètres r, g, b : les composantes RGB de la couleur dans [0, 255]
- Paramètre descr : une description littérale de la balle (ex : "la balle rouge")
- Valeur de retour : l'identifiant unique (uid) de la balle
char* getObjectPosition(const char* uid)
Description : Retourne la position d'un objet à partir de son identifiant (uid)
- Paramètre uid : un identifiant (donné par la fonction
putBallpar exemple) - Valeur de retour : des coordonnées codées dans une chaine du type
"x:y:z"ou"ERROR"
Exemple d'utilisation :
#include "codelab/moduleRobotics3D/robotCoretech.c"
#include "codelab/utils.c"
void main() {
char* uid;
char* position;
float x, y, z;
uid = strdup(putBall(-0.2, 0.05, 0.8, 255, 0, 0, "the red ball"));
printStrLn(uid);
position = strdup(getObjectPosition(uid));
printStrLn(position);
sscanf(position, "%f:%f:%f", &x, &y, &z);
printFormat("x = %f\n", x);
printFormat("y = %f\n", y);
printFormat("z = %f\n", z);
}
Attention : La manipulation des chaînes de caractères en langage C repose sur des mécanismes de gestion de la mémoire (allocation dynamique). L'allocation pour les chaînes uid et position a été réalisée ici par la fonction strdup qui utilise malloc. Consultez une documentation adaptée si besoin.
Résultat de l'exécution du programme dans la console :
the red ball-4dc99a31
-0.200000:0.050000:0.800000
x = -0.200000
y = 0.050000
z = 0.800000
Description : Retourne la position du crayon (extrémité de la pince)
- Paramètre : aucun
- Valeur de retour : des coordonnées codées dans une chaine du type
"x:y:z"
float getX()
float getY()
float getZ()
Description : Retourne une coordonnée du crayon (extrémité de la pince)
- Paramètre : aucun
- Valeur de retour : la coordonnée x / y / z du crayon
 Document under Creative Commons License CC-BY-NC-ND
Document under Creative Commons License CC-BY-NC-ND
Copyright © 2022 Jérôme Lehuen, Le Mans Université, France
 Version 04-05-2022
Version 04-05-2022